Multivariate Data#
A multivariate GP has a vector-valued output f(t), where f is now a vector of multiple dependent simultaneous output functions that share a common time correlated behavior (though perhaps with varying amplitudes). An example is a series of \(D\) parallel timeseries where each timeseries is taken at identical timestamps: \(\boldsymbol{f}(t) = (f_1(t), \dots, f_D(t))\).
There are two ways to handle such data in smolgp. One is to flatten the \(D\) timeseries into a single 1-D datastream and label each measurement with an index which is used to “select” the appropriate amplitude hyperparameter in the kernel’s observation_model, as is done in the tinygp tutorial here. Another is to simply input multidimensional noise (N, D, D) and y (N, D) arrays when defining and conditioning the GP object. Each of the \(N\) measurements will have a \(1 \times D\) vector of measurements and a \(D \times D\) covariance matrix.
Let’s build an example model for a pair of observed time series,
which will share a common underlying kernel (let’s pick the Matérn-5/2 kernel), but for fun let’s have \(y_1\) measure the value of the latent state (times an amplitude \(A\)) and \(y_2\) will measure its derivative (times another amplitude \(B\)). We can define this with the following observation matrix
which gives us the joint observation model for the output vector
where the measurement noise is drawn from \(\boldsymbol{\epsilon}_k \sim \mathcal{N}(0,\boldsymbol{R}_k)\) where
If our two measurements \(y_1\) and \(y_2\) are uncorrelated, then \(\boldsymbol{R}_k = \text{diag}(\sigma_{y_1}^2, \sigma_{y_2}^2)\).
import equinox as eqx
from tinygp.helpers import JAXArray
from smolgp.kernels import Wrapper
class FFprime(Wrapper):
"""
A GP for a 2-D output where the observable is
the state and its derivative, independently
"""
scale: JAXArray | float
sigma: JAXArray | float = eqx.field(default_factory=lambda: jnp.ones(()))
amp1 : JAXArray | float = eqx.field(default_factory=lambda: jnp.ones(()))
amp2 : JAXArray | float = eqx.field(default_factory=lambda: jnp.ones(()))
def __init__(self, scale: JAXArray | float,
sigma: JAXArray | float = 1.0,
amp1: JAXArray | float = 1.0,
amp2: JAXArray | float = 1.0,
name: str='FFprime'):
self.scale = scale
self.sigma = sigma
self.amp1 = amp1
self.amp2 = amp2
self.name = name
self.kernel = smolgp.kernels.Matern52(scale=scale, sigma=sigma)
def observation_matrix(self, X: JAXArray) -> JAXArray:
"""
The observation model H for the observed state,
with amplitude amp1 and the observed derivative,
with amplitude amp2.
"""
del X
H = jnp.array([[self.amp1, 0, 0],
[0, self.amp2, 0]])
return H
kernel = FFprime(scale=1.0, sigma=1.0, amp1=3.0, amp2=1.5)
Next, let’s simulate some data and create the GP object
t = jnp.linspace(0, 20, 15) # observation times
sigma_y = 0.3 # measurement noise for observations of y
sigma_yp = 0.5 # measurement noise for observations of the derivative of y
R = jnp.array([[sigma_y**2, 0], # assume no covariance for simplicity
[0, sigma_yp**2]])
R = jnp.array([jnp.square(R)]*len(t))
# Create the GP object
gp = smolgp.GaussianProcess(kernel=kernel, X=t, noise=R)
def f(t):
return jnp.sin(2 * t) + jnp.cos(t)
def fp(t):
return -jnp.sin(t) + 2 * jnp.cos(2 * t)
# Simulate some data
yerr_train = jax.random.multivariate_normal(key, mean=jnp.zeros(2), cov=R, shape=(len(t),))
y_train = jnp.stack([f(t), fp(t)], axis=-1) + yerr_train
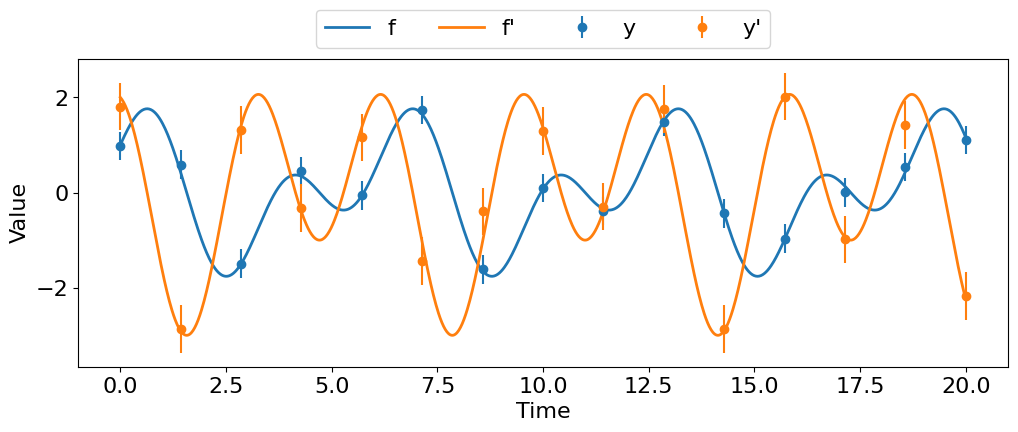
# Plot the data and the true function
ts = jnp.linspace(0, 20, 1000)
fig, ax = plt.subplots(1,1, figsize=(12,4))
ax.plot(ts, f(ts), '-', color='C0', lw=2, label='f')
ax.plot(ts, fp(ts), '-', color='C1', lw=2, label='f\'')
ax.errorbar(t, y_train[:, 0], yerr=sigma_y, color='C0', fmt='o', label='y')
ax.errorbar(t, y_train[:, 1], yerr=sigma_yp, color='C1', fmt='o', label='y\'')
ax.set(xlabel='Time', ylabel='Value')
ax.legend(ncol=4, loc='lower center', bbox_to_anchor=(0.5, 1));
Now, let’s condition the GP on the data
llh, condGP = gp.condition(y_train)
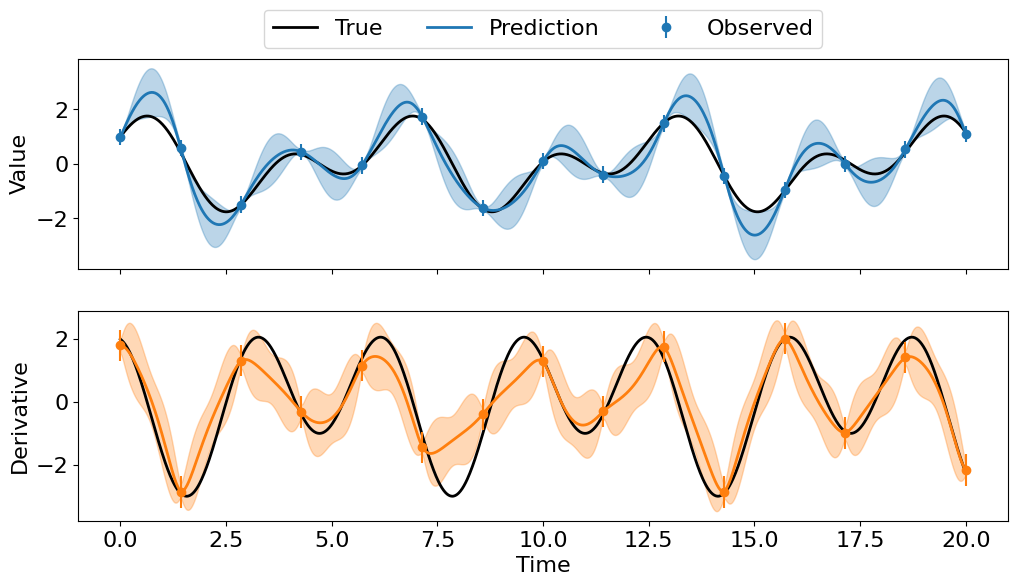
and plot the prediction
ypred, yvarpred = condGP.predict(ts, return_var=True)
yerrpred = jnp.sqrt(jnp.array([yvarpred[:, 0, 0], yvarpred[:, 1, 1]]))
fig, axes = plt.subplots(2, 1, figsize=(12,6), sharex=True)
axes[0].plot(ts, f(ts), '-', color='k', lw=2, label='True')
axes[0].errorbar(t, y_train[:, 0], yerr=sigma_y, color='C0', fmt='o', label='Observed')
axes[0].plot(ts, ypred[:, 0], '-', color='C0', lw=2, label='Prediction')
axes[0].fill_between(ts, ypred[:, 0] - yerrpred[0], ypred[:, 0] + yerrpred[0], color='C0', alpha=0.3)
axes[1].plot(ts, fp(ts), '-', color='k', lw=2, label='True')
axes[1].errorbar(t, y_train[:, 1], yerr=sigma_yp, color='C1', fmt='o', label='Observed')
axes[1].plot(ts, ypred[:, 1], '-', color='C1', lw=2, label='Prediction')
axes[1].fill_between(ts, ypred[:, 1] - yerrpred[1], ypred[:, 1] + yerrpred[1], color='C1', alpha=0.3)
axes[0].set(ylabel='Value')
axes[1].set(xlabel='Time', ylabel='Derivative')
axes[0].legend(ncol=4, loc='lower center', bbox_to_anchor=(0.5, 1));