Quickstart Guide#
The driving design philosophy of smolgp is to match the API of tinygp as closely as possible. With only a few exceptions, any existing code you have that uses tinygp should work with smolgp by simply by finding-and-replacing tiny with smol. In this tutorial, we show the basic usage for constructing a GP object and using it to condition on data and make predictions.
Important
By default, JAX only uses 32-bit floating point precision. For basically everything we want to do, we’ll want double (64-bit) precision which you can enable like so:
import jax
jax.config.update("jax_enable_x64", True)
Initializing the GP kernel#
For this demonstration, we’ll use a damped, driven harmonic oscillator (SHO) as our latent process. We’ll build the model in both smolgp and tinygp to show their similarity and any differences.
import jax.numpy as jnp
sigma = 2.1 # oscillation amplitude
omega = 2*jnp.pi/60. # oscillation frequency
quality = 5.3 # quality factor, < 0.5 for underdamped
kssm = smolgp.kernels.SHO(omega, quality, sigma)
kqsm = tinygp.kernels.quasisep.SHO(omega, quality, sigma)
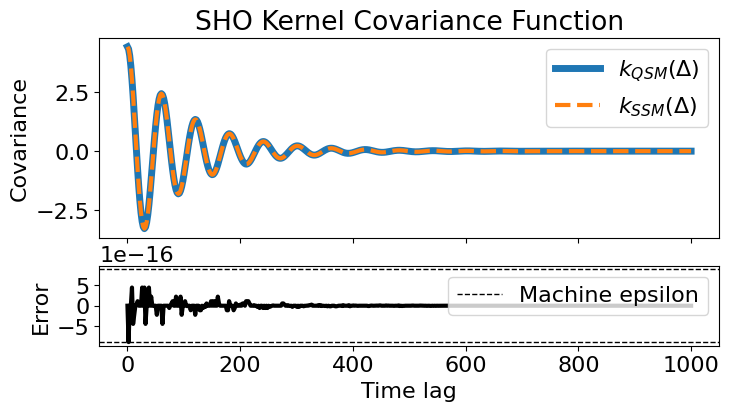
Covariance#
We can plot the covariance function to show that the two are identical:
import matplotlib as mpl
import matplotlib.pyplot as plt
mpl.rc('font', family='sans serif', size=16)
dts = jnp.linspace(0, 1000, 500)
zeros = jnp.zeros_like(dts)
cov_qsm = kqsm(zeros, dts)[0,:]
cov_ssm = kssm(zeros, dts)[0,:]
res_cov = cov_ssm - cov_qsm
## Make the plot
fig, (ax, rax) = plt.subplots(2, 1, figsize=(8,4), sharex=True, gridspec_kw={'height_ratios': [3, 1.2]})
ax.plot(dts, cov_qsm, label=r'$k_{QSM}(\Delta)$', lw=5, color='C0')
ax.plot(dts, cov_ssm, label=r'$k_{SSM}(\Delta)$', lw=3, color='C1', ls='--')
ax.set(ylabel='Covariance', title=f'{kqsm.__class__.__name__} Kernel Covariance Function')
ax.legend()
rax.plot(dts, res_cov, lw=3, color='k')
rax.set(ylabel='Error', xlabel='Time lag')
eps = jnp.abs(jnp.spacing(cov_qsm))
rax.axhline(eps.max(), color='k', ls='--', lw=1, label='Machine epsilon')
rax.axhline(-eps.max(), color='k', ls='--', lw=1);
rax.legend(loc='upper right');
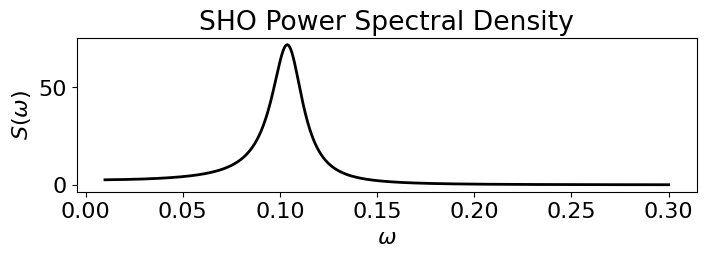
Power spectrum#
We can also inspect the power spectral density (PSD) like so:
w = jnp.linspace(0.01, 0.3, 1000)
S = kssm.psd(w)
fig, ax = plt.subplots(figsize=(8, 2))
ax.plot(w, S, color='k', lw=2)
ax.set(title=f'{kssm.name} Power Spectral Density')
ax.set(xlabel=r'$\omega$', ylabel=r'$S(\omega)$');
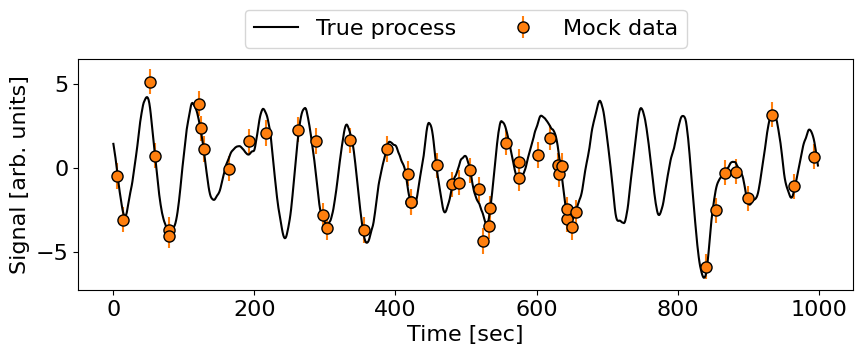
Sample data#
To go further, we’ll need some data to plot and condition the GP on. We can generate some by using the sample function of a tinygp.GaussianProcess (a state-space version of this is coming soon to smolgp):
from scipy.interpolate import make_smoothing_spline
def get_true_process(true_kernel, tmin=0, tmax=1000, dt=1):
t = jnp.arange(tmin, tmax, dt)
true_gp = tinygp.GaussianProcess(true_kernel, t)
# NOTE: gp.sample adds small random noise for numerical stability
y_sample = true_gp.sample(key=jax.random.PRNGKey(32))
f = make_smoothing_spline(t, y_sample, lam=dt/6)
return t, f
## True process
t_true, f = get_true_process(kqsm, tmin=0, tmax=1000, dt=1)
y_true = f(t_true)
## Mock data
t_train = jnp.sort(jax.random.uniform(key, (50,), minval=0, maxval=1000))
yerr = 0.75 * jnp.ones_like(t_train)
y_train = f(t_train) + yerr * jax.random.normal(key, t_train.shape)
# Plot data and true process
fig, ax = plt.subplots(figsize=(10, 3))
ax.errorbar(t_train, y_train, yerr=yerr, fmt="o", color='C1', label='Mock data',
markeredgecolor='k', markersize=8, capsize=0)
ax.plot(t_true, y_true, color='k', label="True process")
ax.set(xlabel='Time [sec]', ylabel='Signal [arb. units]')
ax.legend(loc='lower center', bbox_to_anchor=(0.5, 1), ncol=2);
Constructing the GP object#
Constructing the GP object is the same in tinygp and smolgp. The GaussianProcess object needs at minimum a kernel and the coordinates of the data X (which can be a tuple if the data have multiple identifiers, such as X=(time, exposure_time, instrument_id)). The data often come with measurement error which are passed to the noise argument as the variance in each observation. In tinygp, this is passed as the diag keyword as these occupy the diagonal of the measurement covariance matrix.
gp_ssm = smolgp.GaussianProcess(kernel=kssm, X=t_train, noise=yerr**2)
gp_qsm = tinygp.GaussianProcess(kernel=kqsm, X=t_train, diag=yerr**2)
At the moment, setting a nonzero mean is not supported in smolgp, but in principle is a matter of bookkeeping to implement. Conversely, other noise models which are well-defined in the covariance framework in tinygp are not readily implemented in smolgp.
Likelihood#
The call-signature to obtain the log-likelihood is the same in smolgp as in tinygp:
llh_ssm = gp_ssm.log_probability(y_train)
llh_qsm = gp_qsm.log_probability(y_train)
print('Log-likelihood:')
llh_diff = llh_ssm - llh_qsm
print(f" smolgp: {llh_ssm:f}")
print(f" tinygp: {llh_qsm:f}")
print(f" Difference: {llh_diff:.3e}")
assert jnp.abs(llh_diff) < 1e-12, "Log-likelihoods do not match!"
print("Log-likelihoods match to numerical precision!")
Log-likelihood:
smolgp: -95.934278
tinygp: -95.934278
Difference: 0.000e+00
Log-likelihoods match to numerical precision!
Conditioning#
Conditioning the GP on data is also the same syntax as tinygp, and likewise returns both the log-likelihood and the conditioned GP object. The conditioned mean and variance at the data are stored in this conditioned GP object in the loc and variance attributes.
llh_qsm2, condGP_qsm = gp_qsm.condition(y_train)
llh_ssm2, condGP_ssm = gp_ssm.condition(y_train)
print('Conditioning GPs on data...')
assert llh_qsm2==llh_qsm, 'tinygp: Condition returned different llh than log_probability!'
assert llh_ssm2==llh_ssm, 'smolgp: Condition returned different llh than log_probability!'
mean_diff = condGP_qsm.loc - condGP_ssm.loc
offset = jnp.sqrt(jnp.finfo(jnp.array([0.])).eps) # tinygp includes a small jitter in variance for numerical stability
var_diff = (condGP_qsm.variance-offset) - condGP_ssm.variance
print(f' Mean max abs diff: {jnp.max(jnp.abs(mean_diff)):.3e}')
print(f' Variance max abs diff: {jnp.max(jnp.abs(var_diff)):.3e}')
assert jnp.max(jnp.abs(mean_diff)) < 1e-9, "Conditioned means do not match!"
assert jnp.max(jnp.abs(var_diff)) < 1e-9, "Conditioned variances do not match!"
print('Conditioned means and variances match to numerical precision!')
Conditioning GPs on data...
Mean max abs diff: 1.332e-15
Variance max abs diff: 2.470e-15
Conditioned means and variances match to numerical precision!
Predicting at arbitrary coordinates#
The syntax for predicting at an array of test coordinates is slightly different. In smolgp, the first argument of predict is the test coordinate array rather than the data array. This is because the condition step has already incorporated the measurement values, and so the conditioned GP object can be used to do just the prediction step and save on computation. In tinygp, the predict function essentially conditions and predicts simultaneously, so both arrays are required and overall is slower to compute.
t_test = jnp.arange(-100, 1100, 1)
mu_qsm, var_qsm = gp_qsm.predict(y_train, t_test, return_var=True)
mu_ssm, var_ssm = condGP_ssm.predict(t_test, return_var=True)
print('\nPredictions at new points:')
pred_mean_diff = mu_qsm - mu_ssm
pred_var_diff = (var_qsm - offset) - var_ssm
print(f' Mean max abs diff: {jnp.max(jnp.abs(pred_mean_diff)):.3e}')
print(f' Variance max abs diff: {jnp.max(jnp.abs(pred_var_diff)):.3e}')
assert jnp.max(jnp.abs(pred_mean_diff)) < 1e-9, "Predicted means do not match!"
assert jnp.max(jnp.abs(pred_var_diff)) < 1e-9, "Predicted variances do not match!"
print('Predicted means and variances match to numerical precision!')
Predictions at new points:
Mean max abs diff: 7.105e-15
Variance max abs diff: 4.274e-15
Predicted means and variances match to numerical precision!
It is possible of course in smolgp to condition and predict all in one step, like so:
mu_ssm2, var_ssm2 = gp_ssm.predict(t_test, y_train, return_var=True)
print(jnp.all(mu_ssm2==mu_ssm), jnp.all(var_ssm2==var_ssm))
True True
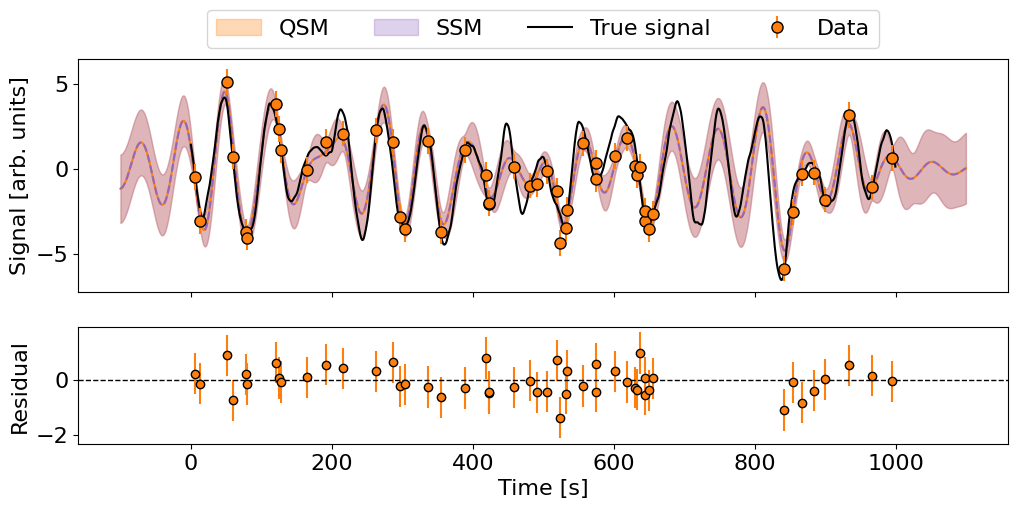
Plotting the results#
Below we plot the data, the true process, the predictions at the data points (and their residuals in the lower panel), as well as the predictive mean and variance before, during, and after the data.
import numpy as np
fig, (ax, rax) = plt.subplots(2,1, figsize=(12,5), sharex=True,
gridspec_kw={'height_ratios':[2,1]})
## Predictions
ax.plot(t_test, mu_qsm, color='C1')
ax.plot(t_test, mu_ssm, color='C4', ls='--')
ax.fill_between(t_test, mu_qsm-jnp.sqrt(var_qsm), mu_qsm+jnp.sqrt(var_qsm), color='C1', alpha=0.3, label='QSM')
ax.fill_between(t_test, mu_ssm-jnp.sqrt(var_ssm), mu_ssm+jnp.sqrt(var_ssm), color='C4', alpha=0.3, label='SSM')
ax.set(ylabel='Signal [arb. units]')
## Data and true signal
ax.plot(t_true, y_true, label='True signal', color='k', lw=1.5)
ax.errorbar(t_train, y_train, yerr, fmt='o', color='C1', markeredgecolor='k', markersize=8, label='Data', alpha=1)
ax.legend(bbox_to_anchor=(0.5, 1), loc='lower center', ncol=4)
## Residuals
rax.errorbar(t_train, y_train - condGP_ssm.loc, yerr, fmt='o', color='C1', markeredgecolor='k', label='Data', alpha=1)
rax.axhline(0, color='k', ls='--', lw=1)
rax.set(xlabel='Time [s]', ylabel='Residual');
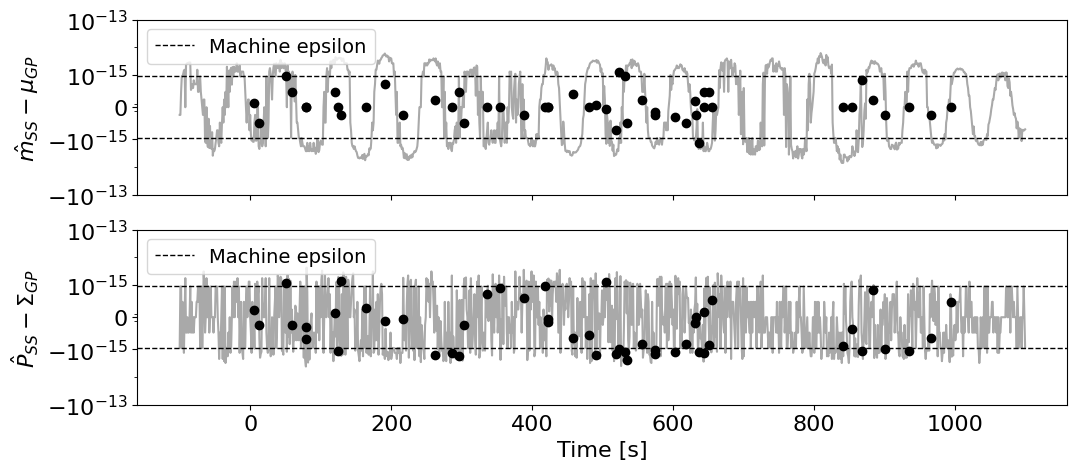
We can also verify that the conditioned and predictive results are the same between smolgp and tinygp to within machine precision.
fig, (max, vax) = plt.subplots(2,1, figsize=(12,5), sharex=True,)
## Mean residuals
max.scatter(t_train, mean_diff, color='k', zorder=100)
max.plot(t_test, pred_mean_diff, color='darkgrey')
eps = np.abs(np.spacing(mu_ssm))
epsmax = eps.max()
max.axhline(epsmax, color='k', ls='--', lw=1, label='Machine epsilon')
max.axhline(-epsmax, color='k', ls='--', lw=1)
max.set(ylabel=r'$\hat{m}_{SS}- \mu_{GP}$')
max.set_yscale('symlog', linthresh=epsmax)
yticks = jnp.arange(-15, -12+1, 2).astype(jnp.float64)
yticks = jnp.hstack((-10**yticks[::-1], 0, 10**yticks))
max.set_yticks(yticks)
max.legend(loc='upper left', fontsize=14)
## Var residuals
vax.scatter(t_train, var_diff, color='k', zorder=100)
vax.plot(t_test, pred_var_diff, color='darkgrey')
eps = np.abs(np.spacing(var_ssm))
epsmax = eps.max()
vax.axhline(epsmax, color='k', ls='--', lw=1, label='Machine epsilon')
vax.axhline(-epsmax, color='k', ls='--', lw=1)
vax.set(ylabel=r'$\hat{P}_{SS}- \Sigma_{GP}$')
vax.set_yscale('symlog', linthresh=epsmax)
yticks = jnp.arange(-15, -12+1, 2).astype(jnp.float64)
yticks = jnp.hstack((-10**yticks[::-1], 0, 10**yticks))
vax.set_yticks(yticks)
vax.set_xlabel('Time [s]')
vax.legend(loc='upper left', fontsize=14);